
Power Control
These two boards are parts of the "Low Level Supervisor Subsystem". They could be considered the "end effectors", the "hands" for the LLS brain.
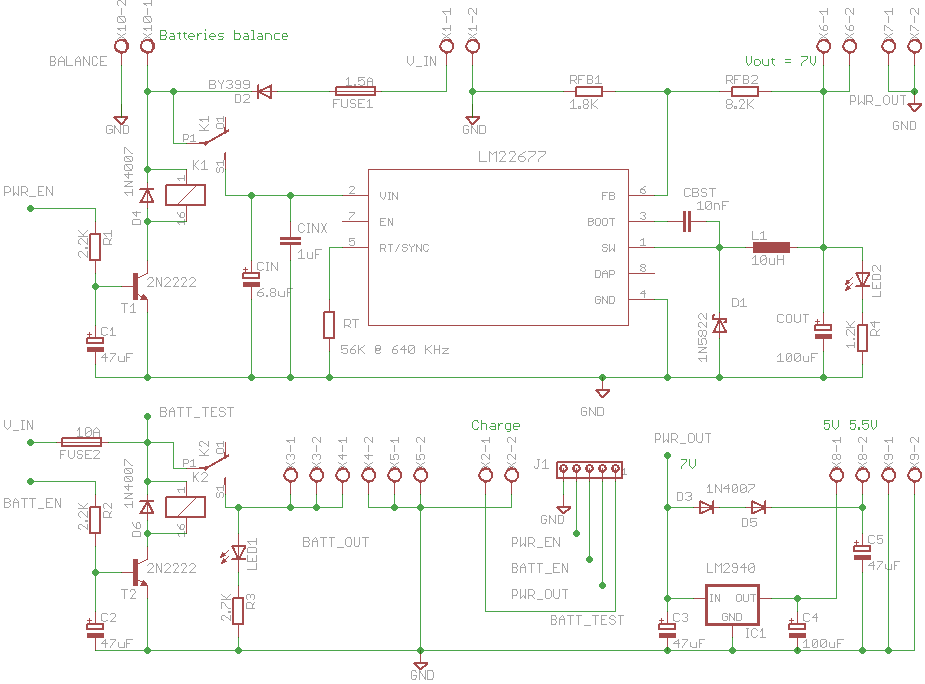
On each Power Control board there is a switching regulator that lowers down the 14.4V battery power supply to a more reasonable 7V, with a very high efficiency. The schematic is the same used for Rino robot. See there for the details. This voltage is then used to supply the on-board linear regulators on each single board of the robot. In this way we have a well filtered power supply for the boards with as less as possible wasted energy.
Both the 7V regulated power supply and the 14.4V unregulated one are controlled by the Low Level Supervisor. If the voltage is within the range, the relays are powered on to start the robot, otherwise an error message is displayed.
The batteries level is monitored continuously to display the remaining power. When it goes down a specific threshold all the robot is switched off to avoid batteries destruction.
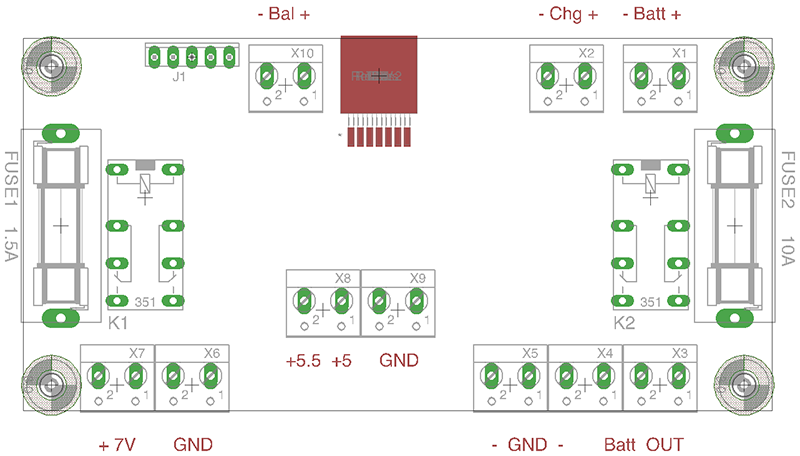
The "Balance" socket is used to connect left and right batteries together in order to balance the discharge when the current drain is not the same.