Dino il robottino
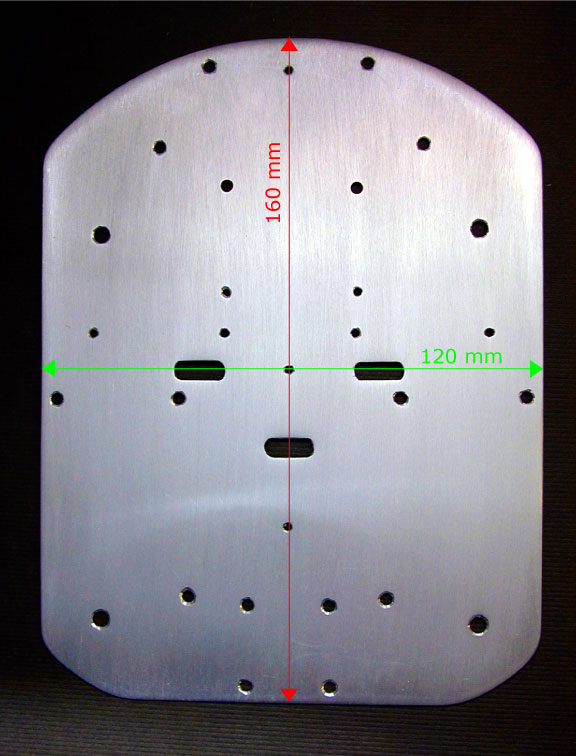
C'era una volta... "Un Re" diranno subito i miei piccoli amici. No, e nemmeno un pezzo di legno come continuerebbe Collodi; solamente un pezzo di alluminio, il materiale che preferisco in assoluto per lavorabilità e reperibilità. Una piastra da 1,5 mm di spessore dalla quale ho ricavato la base .
Dopo un bel po' di prove su carta e su una tavoletta di legno (ma allora c'era il legno!) che ho usato come prototipo, sono arrivato alla forma definitiva, con i fori per il posizionamento dei vari componenti.

Usando un profilato (sempre d'alluminio) di sezione rettangolare da 20x2mm, ho sagomato il paraurti mobile. Con l'aggiunta di una manciata di minuterie, per lo più rimediate ruspando (o ravanando a seconda della collocazione geografica) nei cassetti dove si sono depositati i risultati di anni di "smontaggi", ho fissato le diverse parti.
A fianco una vista dall'alto in una fase di prova di posizionamento delle schede non ancora finite.
Il peso delle batterie è sufficiente a spostare l'equilibrio sul "ball caster".
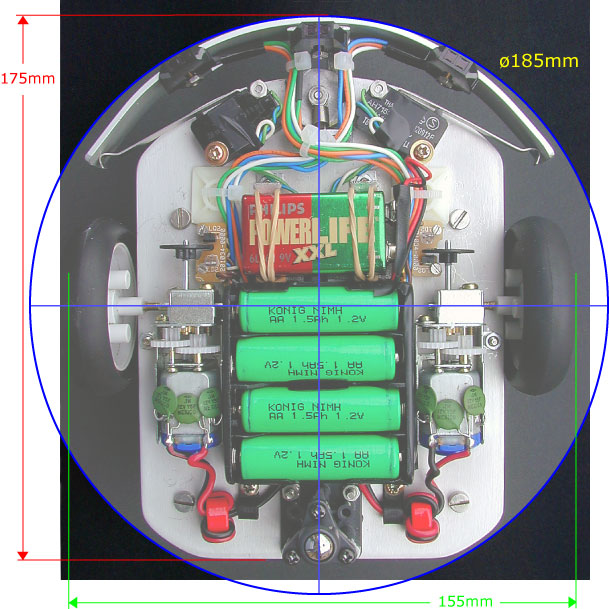
Come si vede dalla foto, "Dino il robottino" rientra ampiamente nelle dimensioni stabilite, compreso il paraurti. Per rendere più semplice il movimento, il sistema è basato su una simmetria cilindrica. L'asse di rotazione passa per il centro della circonferenza di base; la stabilità si ottiene sbilanciando il peso verso il ruotino posteriore.
La meccanica è predisposta per aggiungere schede in pila, ed ospitare quindi altri dispositivi. Seguendo il link a fianco si potranno vedere alcune idee che ho in mente.

