dsNavCon
The navigation control subsystem is composed of the dsNavCon as the “smart” board of the system and a L298-based dual H-bridge board to control the geared 12V motors (Hsiang Neng HN-GH12-1634TR). The circuit of this H-bridge is a classic application of L298 IC. Optimization in a 30 x 40 mm PCB is a work of Mauro Soligo. The motion feedback comes from a couple of 300 cpr encoders (US digital e4p-300-079-ht).
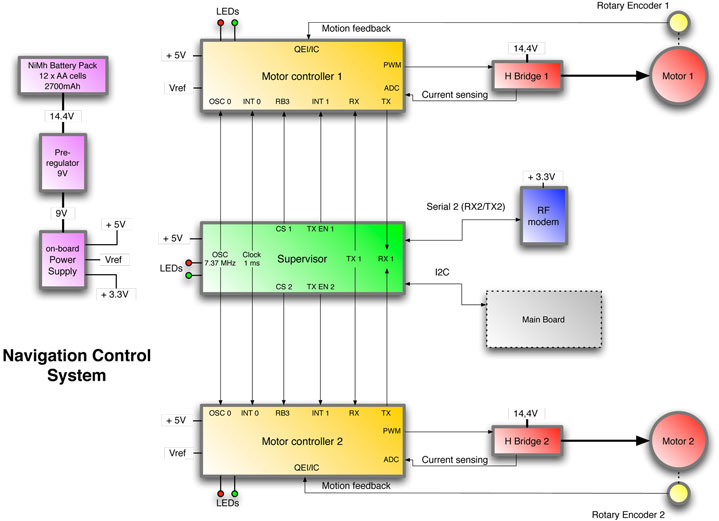
The power is supplied by a 12 AA NiMH cells battery pack, obtaining a nominal voltage of 14.4V, 2700mAh. This ensures the correct voltage for the motors after the loss of the H-bridge. A couple of LM7809 regulators drop down the 14.4V to 9V for logic board’s power supply. The voltage regulators are decoupled with a PI filter on each one. This system reduces motors interference and allows the use of a smaller heat sink for the 5V regulators on each individual board. The power supply on dsNavCon board also provides 3.3V for the Zigbee RF modem (MaxStream XBee module) and 2.7V reference voltage for the motor controllers’ A/D converter. This converter is used to read the motors’ current through a 0.27 Ohm shunt resistor on each H-bridge and a couple of operational amplifiers with a gain of 10 on the dsNavCon board.
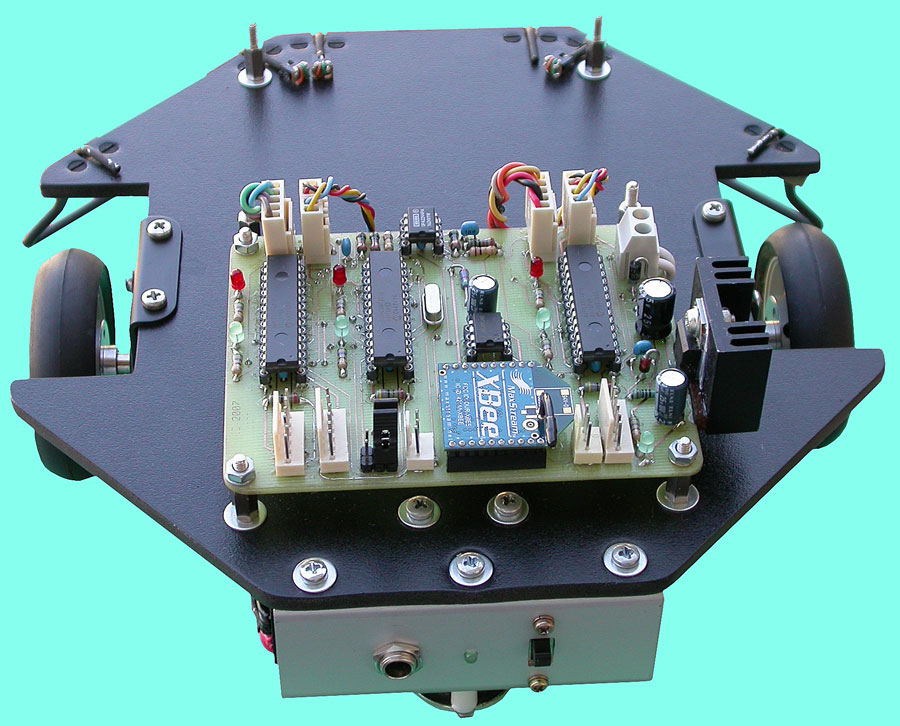
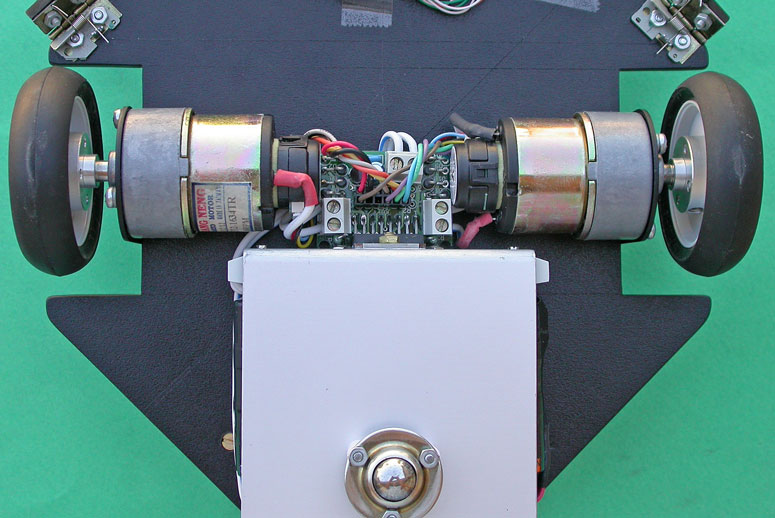
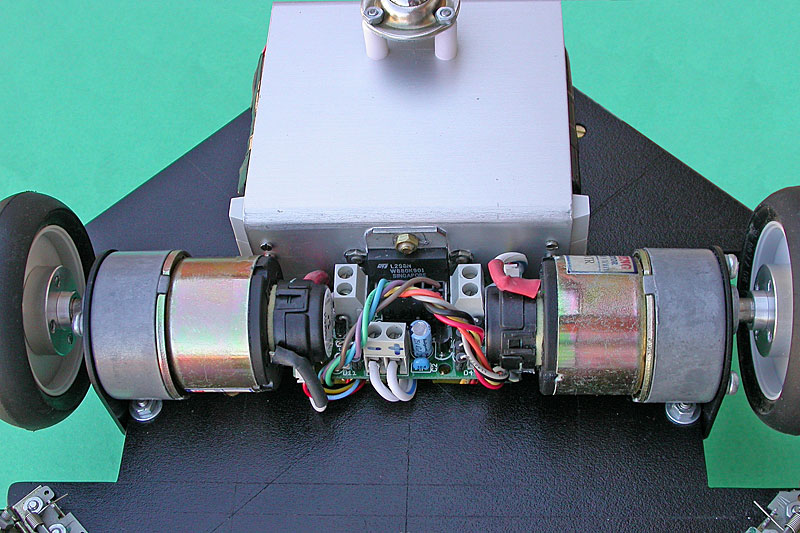
The detail below shows the motors, the encoders and the H-bridges. The metal box contains battery pack, 9V pre-regulators and PI filters. It also acts as a heat sink.
The Supervisor communicates with the "behavior" board of the robot through I2C bus and with a remote PC via Zigbee RF modem for telemetry (UART2 – RX2/TX2). The Supervisor drives both Motor Controllers (MCs) through UART1 (RX1/TX1) communication, sending commands and reading information (space, speed, motor current). The MCs have no oscillator hardware; the Supervisor provides them the clock with a 7.3728 MHz signal obtained by OC simple PWM peripheral. A 1ms timing signal is provided as well by the Supervisor to synchronize every operation. The Supervisor controls MCs communications and other operations, enabling them with some chip-select I/O signals.
Some differences may be found between schematics and photos. The board is a prototype and the project is still in development; the schematics and the PCB layouts are up to date with corrections to any issues found whereas the board is patched just for critical issues but not for aesthetic ones.
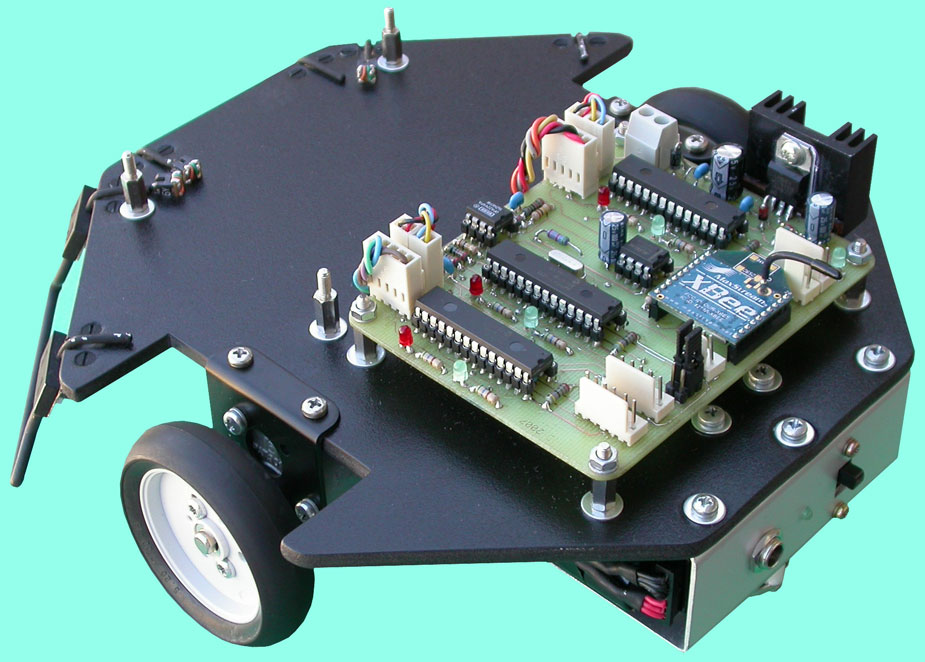
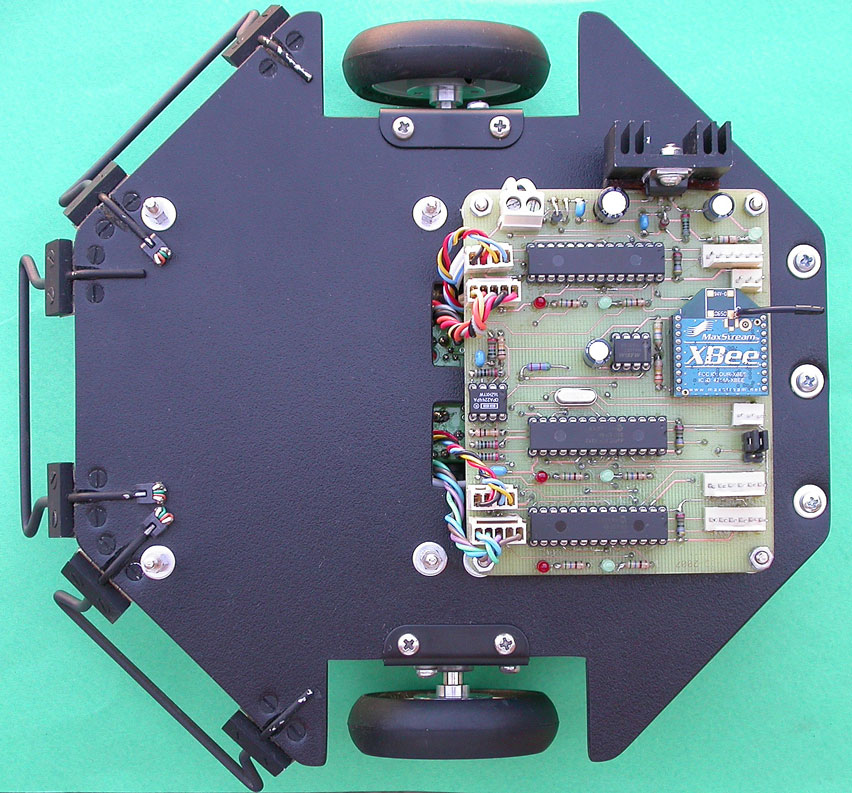
This are overall pictures of the whole navigation control subsystem (as described in the block diagram) installed on the robotic platform.