Quad Sonar
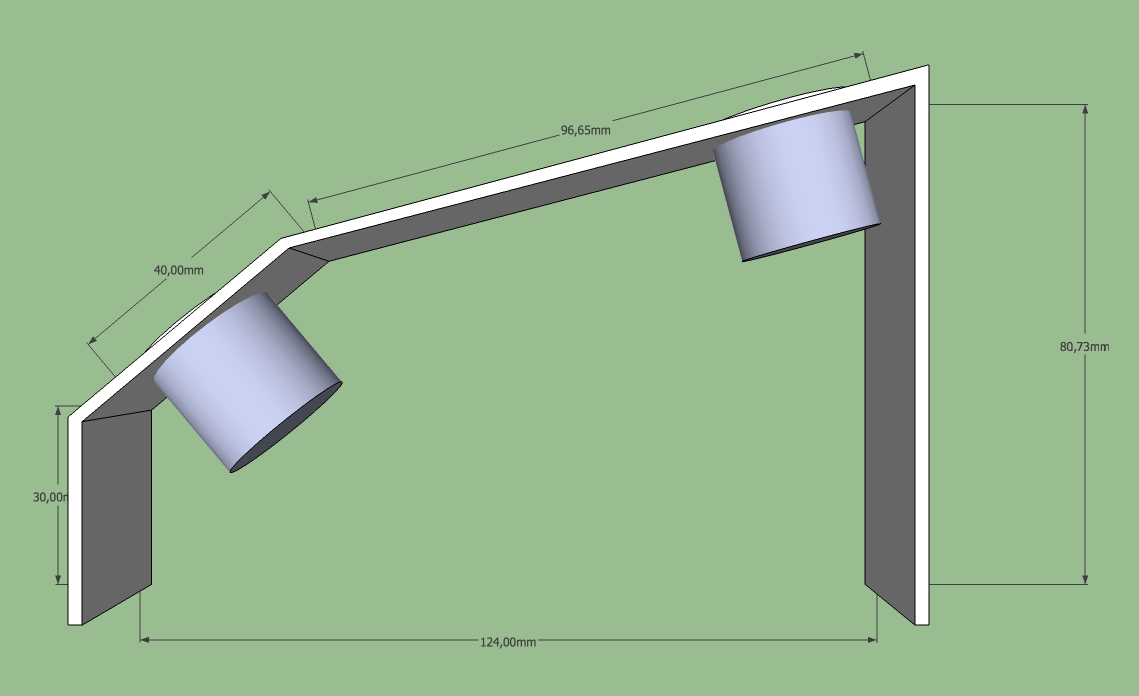
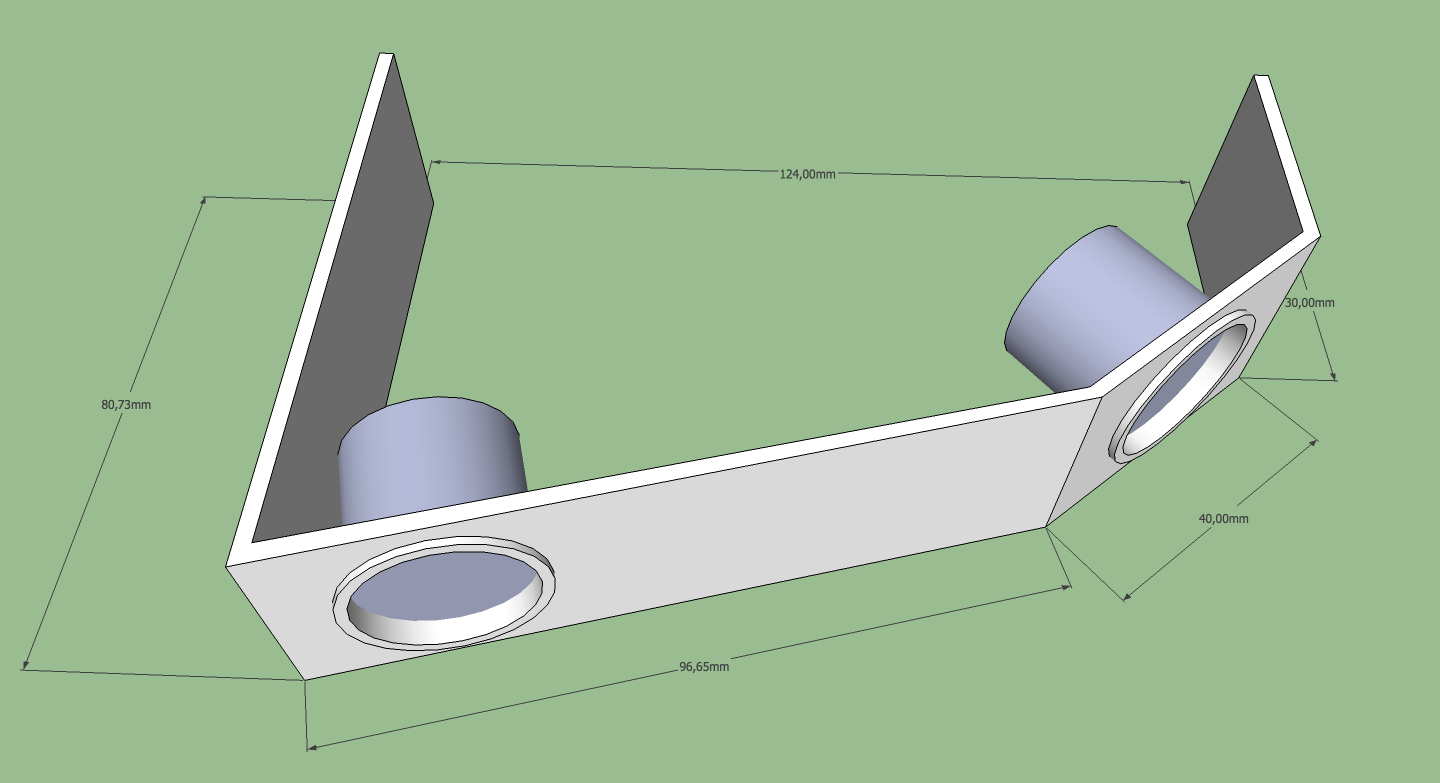
This is a quoted project to realize the mounting brackets according to the needed angles.


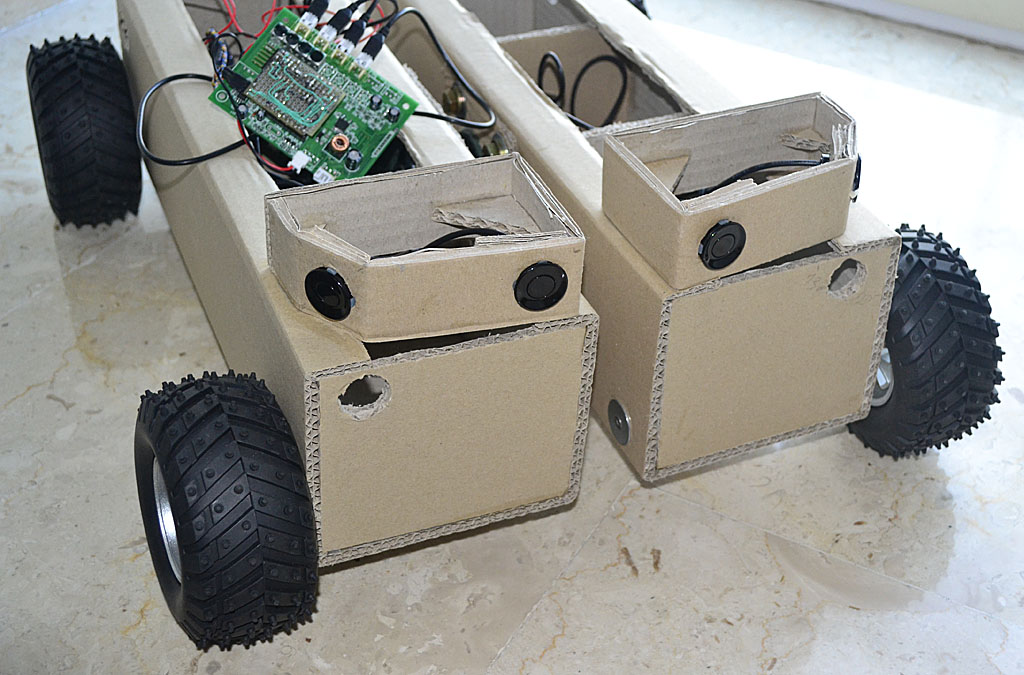
A quick test on the corrugated paper mockup I've realized to verify the structure of the robot I'm going to build, confirms the simulation above.

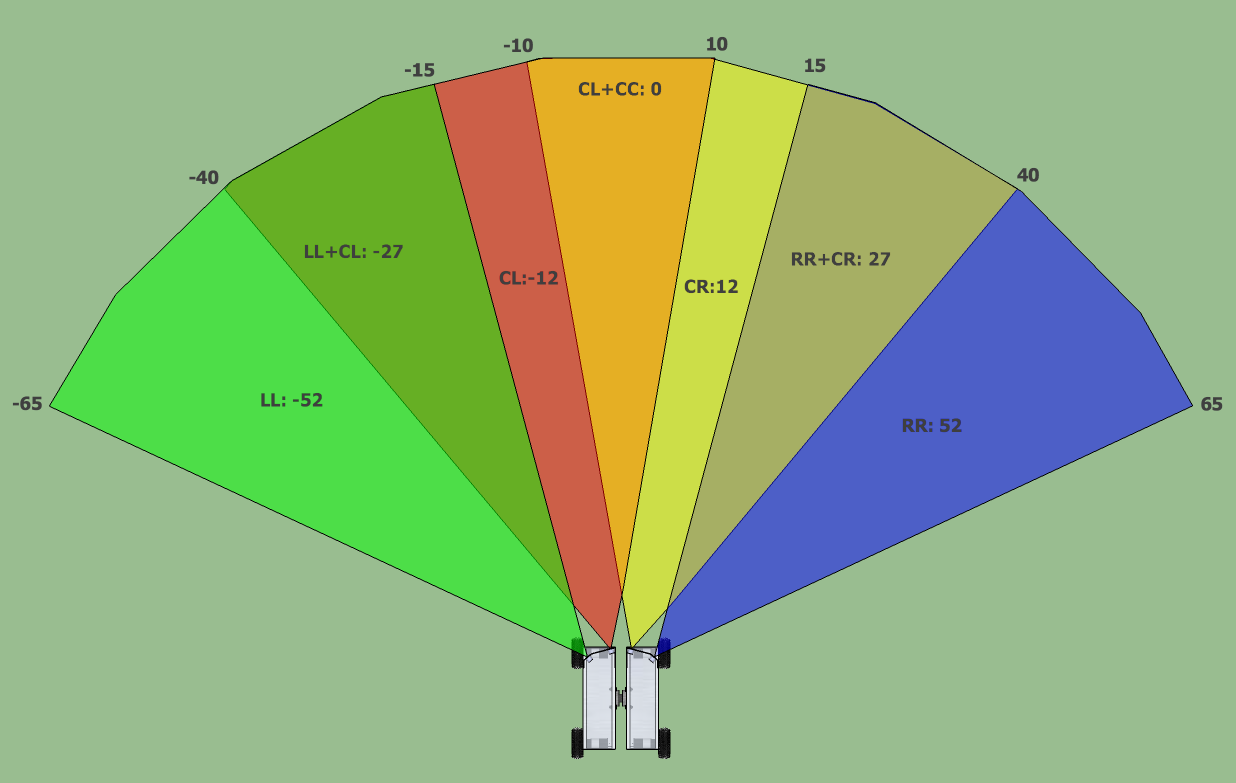
A simple simulation with the following orientations:
LL = -40° (Left-Left)
CL = -15° (Center-Left)
CR = +15° (Center-Right)
RR = +40° (Right-Right)
Returns a 130°
(-65 to +65°) total range, as visible in this picture, with different zones. It's easy to understand via software in which one of the 7 zones the object is, comparing the readings of two adjacent sensors.
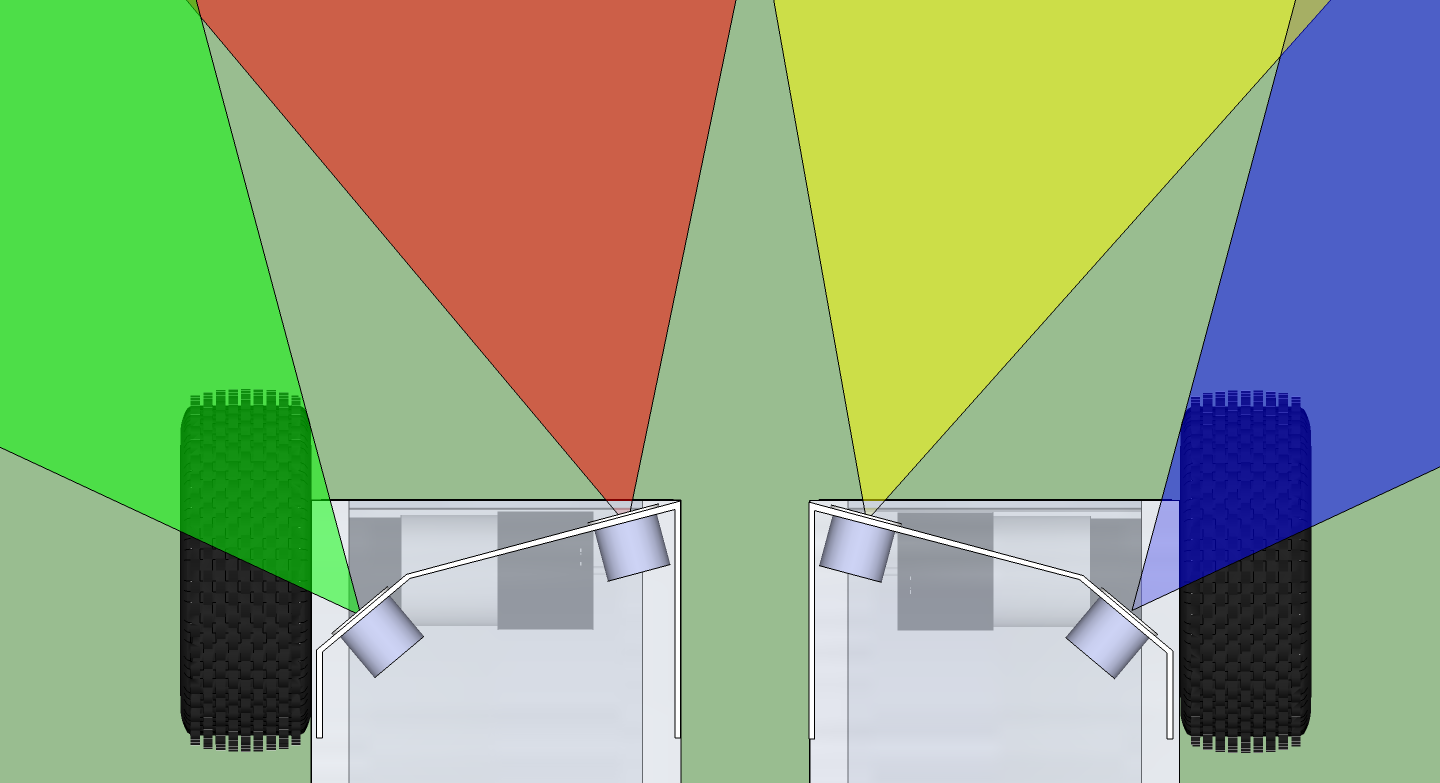
Using a simple aluminum mounting bracket the sensors can be oriented to the desired angles.
At the beginning, reading the data sheet:
Directivity (deg) X-axis 115±15
I thought to install the sensors as shown to the right. With such an angle, the only way to avoid too much intersection between two sensors, is separating them by 90°

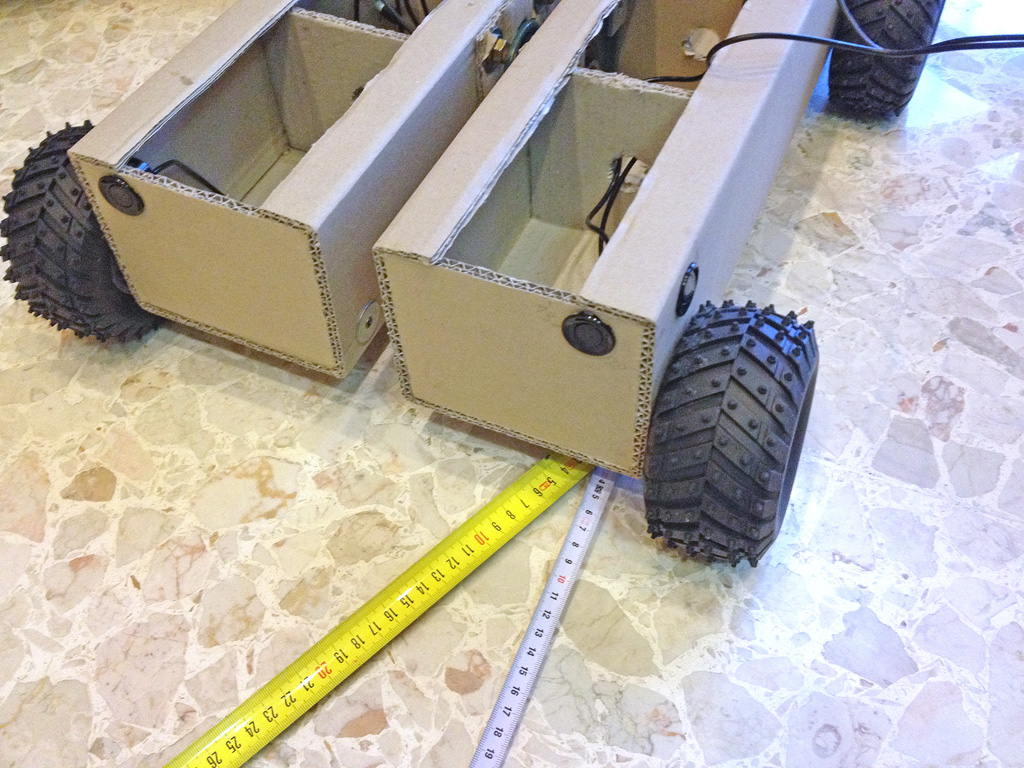
But I did some tests with my configuration, i.e. with the real sensitivity I've set up in the circuit.
The object is detected only within the angle shown in this picture:
the cathetus, or leg, of the triangle is 77,5cm, the hypotenuse is 85cm.
Therefore the angle is ARCCOS(77,5/85)=24.25
This changes everything.