H-Bridges
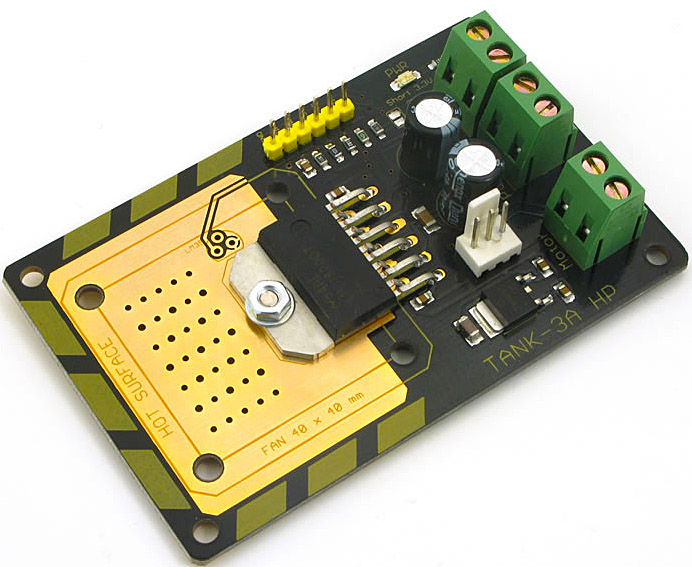
This TANK-3A HP bridge is a practical LMD18200 usage. It is capable to drive a 3A load in any mode. To have a good PID control we need to use LAP mode, in order to control the motor on each one of the four quadrant.
Pay attention to the possible capacitors inside the motors.
It could be a very odd load for the bridge at high frequency, rapidly causing a dangerous overheat. The Micromotors E192 series can be acquired in WOC (WithOut Capacitors) mode, to save a dangerous manual removal of the well installed capacitors.

An empirical method was applied to decide the right PWM frequency but I have (later) discovered that I'm not the only one to use this method.
The idea was: if the motor is "comfortable" with a particular frequency, it will return the same torque with a lower current consumption.
Applying a load to the motor, while measuring the current and varying the PWM frequency (at the same duty cycle of course), it is almost stable in the 20-30kHz range. The H-bridge is able to manage such a frequency, it is beyond the audible range, let's say 25kHz.